
新能源汽车测试
(1)四驱新能源汽车综合性能测试
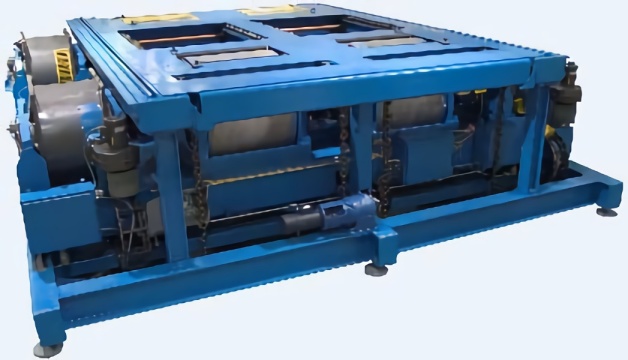
为了迎接电气化、智能化的汽车工业转型升级,培养具有新能源汽车先进动力控制技术、测试技术等高端汽车工程人才,浙江大学新建4×4四驱新能源汽车综合性能测试平台。目前该平台是中国高校新能源汽车底盘测功系统性能最好的平台之一。测试平台由四个独立的交流电机驱动的四个转鼓,模拟实际的道路状况例如速度、扭矩、阻力等,为转鼓上的被测车辆提供精确的道路负载模拟或道路试验条件,使车辆在与实际道路行驶相同的条件下运行、测试。控制系统采用美国宝克公司第四代全数字式实时控制器,能够提供更快的响应时间和控制精度。设备适用于四驱/两驱轻型车或中型车、电动车、混合动力车。

系统特点:
四独立转鼓、四独立电机设计的底盘测功机
世界先进全电惯量模拟技术
测功机系统的模块化的设计
内置EPA标准测试/认证步骤
美国宝克公司第四代全数字式实时控制器, 精度高、重复性好、可靠性高
前馈控制技术,用于大功率的交流向量控制技术
在US06工况下,可实现±0. 05 Km/h的前后桥速度同步精度
电能回馈满足IEEE-519的要求
基于Windows系统的图形化用户界面,直观易懂,操作方便
提供在线帮助信息,在线系统故障诊断
转鼓表面镀铬处理,可以方便地在地板上方进行标定和润滑,具有很好安全控制与保护系统
主要参数:
转鼓直径 | 48” ± 0.010” |
惯量模拟范围 | 450 ~ 3,500 Kg |
系统响应时间 | ≤65 ms |
道路载荷模拟精度 | ± 1% F.S. or ± 1 Kg |
转鼓最大速度 | 200 Km/h |
速度测量精度 | <± 0.02 Km/h |
速度控制精度 | <± 0.05 Km/h |
轴距调节范围 | 2,000 mm ~ 4,000 mm |
轴距调节精度 | ± 2 mm |
测试应用(主要功能):
CFR Part 86 | EPA相关标准 |
GB/T 19752-2005 | 混合动力电动汽车动力性能试验 |
GB/T 18385-2005 | 电动汽车动力性能试验 |
GB / T 12543-2009 | 加速行驶试验 |
GB / T 12544-2012 | 最高车速试验 |
GB / T 12543-2009 | 起步,连续换档加速试验 |
GB / T 12547-2009 | 最低稳定车速 |
GB/T 12543-2009 | 直接档试验 |
GB / T 12536-1990 | 滑行试验 |
GB / T 12539-1990 | 模拟爬坡试验 |
GB/T 12537-1990 | 汽车牵引性能试验方法 |
GB/T 12542-2009 | 汽车热平衡能力道路试验 |
GB/T 12782-2007 | 整车采暖性能试验 |
QC/T 658-2000 | 整车降温性能试验 |
GB/T 18276-2000 | 汽车动力性台架试验(驱动轮输出功率) |
四驱性能匹配,TCS测试等 | |
智能驾驶道路模拟试验等 |
(2)新能源汽车电机驱动测试
新能源汽车电机驱动测试系统主要用于车用新能源电机及其控制器的常规性能试验,耐久和负载试验,以及其它开发研究性试验(如:电机的开发、测试、对比等试验),以满足电动车项目开发的需要。




主要配套设备及指标如下:
序号 | 设备名称 | 设备型号 | 主要设备参数 |
1 | 主驱动电机测试系统 | 定制 | 169kW加载异步机(峰值200kW)、四象限加载电机驱动器、测试台架(安装台架、传感器)、电池模拟器、控制系统(控制柜、自动测试软件);动力加载单元:额定功率169kW,最大功率(60s)200kW,额定转矩380N.m,最高转矩(60s)455N.m,额定转速4260mpm,最大转速16000rpm,电池模拟器:双向供电20-680VDC±600A,效率≥97% |
2 | 定制 | 可模拟负载四象限运行,最大功率55kW,额定转速3000rpm,最大转速12000rpm, 额定转矩160N.m,可实现多相电机的性能测试 | |
3 | 电动汽车主驱动多相电机实时仿真系统 | 定制 | 可模拟负载四象限运行,最大功率22kW,额定转速2860rpm,最大转速8000rpm, 额定转矩70N.m,实时仿真管理软件与MATLAB/Simulink无缝兼容,一键式操作完成代码的自动生成、加载和实时运行 |
4 | 定制 | 最高转速100000rpm,额定转矩≤3N.m;额定功率≤25kW;最大功率≤40kW(10s);最大转矩:3.5Nm(10s),支持包括但不仅限于电压、电流、效率、频率、转速、扭矩、机械功率等参数的测量,支持高速采集数据分析功能,支持完全自主控制的开放测试,可以配置负载和被测的控制模式,转速值、扭矩值、粗调、微调、开环、闭环等 |
(3)智能驾驶控制策略测试
智能驾驶技术包括先进驾驶辅助、网联驾驶、自动驾驶及自主驾驶,是在复杂交通环境条件下实现车辆驾驶“安全、节能、舒适”目标的必然途径。车道保持、自适应巡航控制以及SAE L3自动驾驶都属于典型的智能驾驶技术,可极大降低驾驶员操作难度、提高安全性和舒适性。智能驾驶教学科研实训平台,可用于智能驾驶领域的前瞻问题研究和工程研发类测试。
平台组成:包括六自由度运动驾驶模拟器、车载环境感知系统、车辆线控及智能驾驶系统原型、实时运算软硬件系统、实验数据采集分析设备等部分。其中,模拟器包括运动平台、驾驶舱、控制柜等,环境感知系统包括激光雷达系列、GPS惯导等,线控原型包括转向及制动线控系统,实时平台包括动力学软件、快速原型控制器等,数据采集设备包括人因工程设备、NI PXI等。

功能:平台可实施车辆线控转向/制动、车辆动力学控制、环境感知与理解、决策规划、驾驶辅助、人车路闭环验证等多种实验。